A Cost Effective Method for Capturing High Accuracy Ground Control


Having completed my biennial flight review last year, I decided to add a Part 107 small unmanned aircraft system (sUAS) certification as well. The drone aerial imagery business is very interesting to me, and I wanted to learn more. Shortly afterwards, I purchased a DJI Phantom 3 Pro, and the journey began.
Stepping back a few months, Bad Elf customers requested a process to improve accuracy for ground control point (GCP) collection. We defined a reliable post-processing workflow that satisfied this requirement. Collaborating with Eric Sheehan of Vine Oil and Gas, we determined that our post-processing workflow would dramatically improve the location accuracy of aerial GCP collection.
There was a catch. Traditional post-processing requires occupying a point for 15-20 minutes, recording the raw satellite data, then processing this data to extract the static fixed point.
Traditional Method - Slow but Effective
What changed? As I became comfortable flying my own sUAS, I wanted to test and verify the procedures Eric and I discussed. Spending a few hours in the Phoenix early summer heat helped me to realize there had to be a way to refine the traditional process.
My test site was an area in Scottsdale of approximately 35 acres in size. I had tested many flight planning apps and had sufficiently tuned my process of collecting the aerial imagery. Using a Bad Elf GNSS Surveyor, I captured 1m or better GCPs on top of the aerial targets. Using a number of web-based solutions, I processed my imagery and clearly the accuracy improved from that natively produced by the DJI Phantom 3.
Not being satisfied with this result, I wanted better. Spending 15 minutes over each GCP works, but this adds significant time to the process, much more time than setup and flying the work area. Every time I flew a property, part of the procedure was geolocating the GCP and retrieving the GCP targets. I knew that I didn’t want to spend 15 minutes at each GCP; but maybe 3-5 minutes wasn’t so bad.
Is Decimeter Photogrammetry Achievable with a little Innovation?
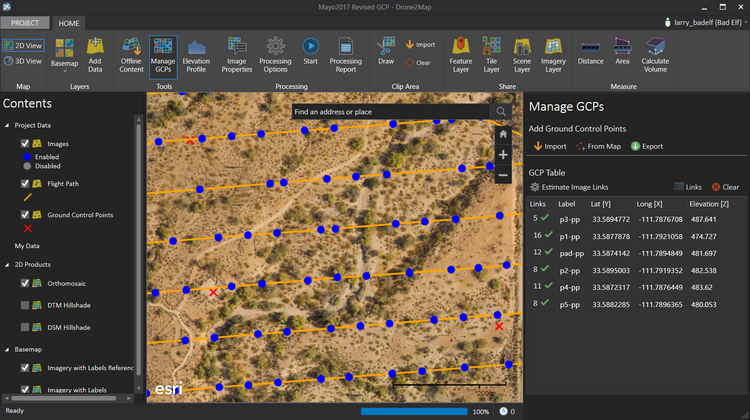
At the Esri Partner Conference, the Drone2Map team announced that feature layers captured in Collector for ArcGIS are available for use as GCP in Drone2Map. With a direct import from a feature layer, an interesting process emerged. If 1m accuracy is satisfactory, using Collector for ArcGIS to capture GCP is highly efficient for direct use in Drone2Map. Verifying the process convinced me that I could complete an entire project in an Esri workflow with my iPhone, a DJI sUAS, and a Bad Elf GNSS Surveyor.
One early morning while testing my process, I had an idea. Could I pull off a post-processed kinematic (PPK) solution? Kinematic post-processing has a slightly different workflow than static occupations. For best results with Bad Elf receivers, I have found that recording a stationary point for a period of time, 15 minutes or so, aids the kinematic solution processing for the rest of the collected data.
 Since I already had to fly for about 17 minutes to capture the aerial data, I just set the GNSS Surveyor down on the first GCP and started the Bad Elf iOS app in raw data recording mode. After my flight, I put away my DJI and went about the process of gathering and collecting my GCPs. At the first point I captured a GPS location using Collector for ArcGIS. Moving to the next point I realized that I needed to keep my GNSS Surveyor oriented toward the sky to avoid losing lock and disrupting the clean data flow from my raw recording. The elegant solution was to Velcro the unit to my hat and start walking. When I got to the successive points, I set the GNSS Surveyor down on the aerial target, let it settle for 5 minutes, and before moving recorded a GPS location in Collector for ArcGIS. Once I had arrived at my last GCP, the process of raw data recording could be concluded.
Since I already had to fly for about 17 minutes to capture the aerial data, I just set the GNSS Surveyor down on the first GCP and started the Bad Elf iOS app in raw data recording mode. After my flight, I put away my DJI and went about the process of gathering and collecting my GCPs. At the first point I captured a GPS location using Collector for ArcGIS. Moving to the next point I realized that I needed to keep my GNSS Surveyor oriented toward the sky to avoid losing lock and disrupting the clean data flow from my raw recording. The elegant solution was to Velcro the unit to my hat and start walking. When I got to the successive points, I set the GNSS Surveyor down on the aerial target, let it settle for 5 minutes, and before moving recorded a GPS location in Collector for ArcGIS. Once I had arrived at my last GCP, the process of raw data recording could be concluded.
 Using the method discussed provided a very repeatable PPK result. Setting the Bad Elf down and letting it record allowed the post-processing tools to compute a fixed solution over each GCP. The final step in the process was correlating the PPK data so I could extract the GCPs. Collector for ArcGIS helped as it contained my 1m autonomous data. I constructed my feature layer with full GNSS metadata so I had GPS time stamps. All I needed to do was match the Collector for ArcGIS timestamps with my PPK data for highly accurate GCP!
Using the method discussed provided a very repeatable PPK result. Setting the Bad Elf down and letting it record allowed the post-processing tools to compute a fixed solution over each GCP. The final step in the process was correlating the PPK data so I could extract the GCPs. Collector for ArcGIS helped as it contained my 1m autonomous data. I constructed my feature layer with full GNSS metadata so I had GPS time stamps. All I needed to do was match the Collector for ArcGIS timestamps with my PPK data for highly accurate GCP!
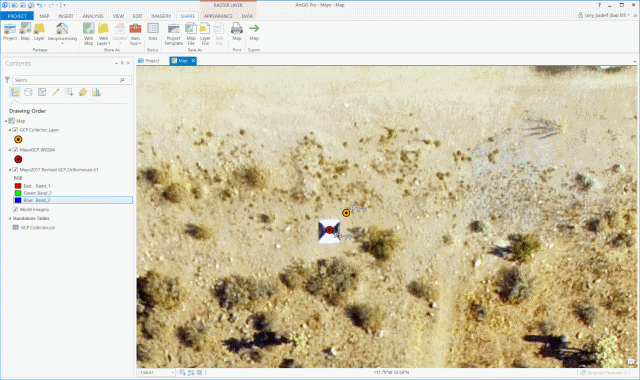
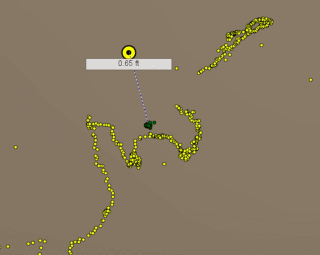
With high-accuracy GCPs now available, I converted the GCP from NAD83 to WGS84. I have found it is best to work in one datum and generally stick with WGS84. I compared the autonomous result from the GNSS Surveyor to the post-processed version and the results spoke for themselves. When verified with an RTK receiver, results for the post-processed GCP were generally within 10cm. If absolute accuracy is important for your imagery, high accuracy GCPs are an effective means to achieve this result.
Reliable and Budget Friendly
Eric tested and verified this process using a GNSS Surveyor and a 3DR drone. Independently, he confirmed similar results. Together we presented a session at the Esri Imaging and Mapping Forum (IMF). A copy of the presentation is available here.
Furthermore, the whole process is executed in an Esri ecosystem. A feature layer is created in ArcGIS Desktop, published to ArcGIS Online, converted to a web map, and used to capture GCPs in Collector for ArcGIS. GCP are collected, post-processed, and imported into Drone2Map, where a high-accuracy orthomosaic, DSM (Digital Surface Model) & DTM (Digital Terrain Model) are produced. All Drone2Map output products are available for consumption on the desktop or the web.
Finally, and most importantly, this process demonstrates that a Bad Elf GNSS Surveyor and a prosumer drone are capable of producing a commercially viable orthomosaic usable in a GIS and costing under $1500.
Larry Fox is VP of Marketing and Business Development at Bad Elf. He has over twenty years of experience as a product visionary, business development, and technology strategist. He is an innovator with the ability to identify, design, and launch complex hardware and software solutions, Fox has leadership experience with diverse and highly dynamic teams from startups to Fortune 500 companies. Throughout his career, he has patented expertise in GNSS/GPS technologies, mobile applications, web development, and wireless communication solutions. Larry is an active private pilot and is a part 107 operator.